
RipenessM
熟度判定システム
世界初熟度測定システム
MIXIA株式会社は、新開発のセンサーとビジョンを併用した熟度測定システムを開発いたしました。
熟度判定システムは、外観より判定出来ない食品の熟度(硬度)を数値化して判断します。
食品毎の硬さ、加工条件によるバラつきをカンコツ及び官能試験に頼らない方法を提供します。
新開発のセンサーと変形状態の画像を使用することで、熟度測定いたします。

【センシングデバイス本体】

【ビルトインカメラ】
(LED照明付き)
(LED照明付き)

【計測中姿勢】

【ビルトインカメラ画像】
(LED点灯中)
(LED点灯中)
適用ポイント例
- 食感判定(やわらかい、硬いなど)
- 収穫判定(食べごろか、まだはやいか)
- 全数検査(外観検査、非破壊検査に掛からない製品)
- 成熟度判定(加工可能か、まだ早いか)
- 品質管理(官能試験の置き換え)
Force Distribution
高解像度での力分布測定
【センサーの全面で把持した場合】



面に対して全体的に力の分布が表現されます。
*センサーの中心を含む全体を網羅する形で把持しています。
【センサーの片面で把持した場合】


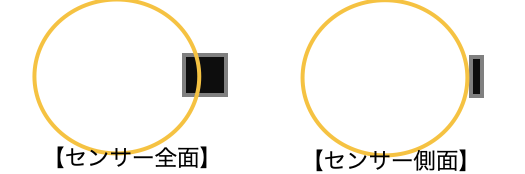
面に対して右側に力の分布が表現されます。
*片側に偏った把持なので、外側に逃げる力が見て取れます。
【見方説明】
- 円の大きさが、力の強弱を表現
- 線の向きが、力の掛かっている方向を表現
*測定された力分布は、ニュートン単位の出力が可能です。
システム構成
-
センサーデバイス本体
*対象製品に合わせたカスタム形状 -
把持デバイス(測定機構)
*同上 -
判定ソフト
(センサー情報&画像情報)
バリエーション
- インライン対応(全数検査)
- 卓上測定(抜き取り試験対応)
- 協働ロボット接続連携
オプション
- 外部デバイスDATA連動
将来的にこんなことが可能になる可能性が!

RipenessM(硬度測定)
▶
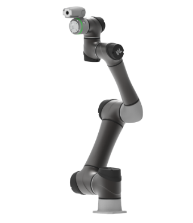
ロボット連携
▶
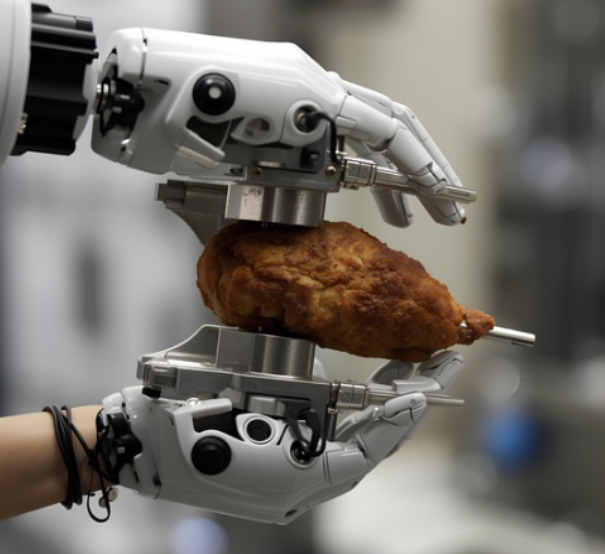
高精度センサー(作業者の力加減)